Linux Kernel Pwn:Environment Build - Set up a Kernel Runtime Environment
搭建内核运行环境
QEMU 是一款开源的虚拟机软件,支持多种不同架构的模拟(Emulation)以及配合 kvm 完成当前架构的虚拟化(Virtualization)的特性,是当前最火热的开源虚拟机软件。
这一章节主要介绍如何使用 QEMU 来搭建调试分析环境。为了使用 qemu 启动和调试内核,我们需要内核、QEMU、文件系统。
获取QEMU
先安装通用神秘小工具:
1 | |
然后安装QEMU和KVM:
1 | |
为了使 Qemu 工作,你必须 将你的用户加入两个组:libvirt-kvm 和 libvirt。
1 | |
使用 BusyBox 搭建基本的文件系统
BusyBox 是一个集成了三百多个最常用 Linux 命令和工具的软件,包含了例如 ls 、cat 和 echo 等常见的命令,相比起各大发行版中常用的 GNU core utilities ,BusyBox 更加的轻量化,且更容易进行配置,因此我们将用 busybox 为我们的内核提供一个基本的用户环境。
下载编译 Busybox
需要注意的是,在主机使用较新的内核版本的情况下,BusyBox 可能会无法完成编译,这个 Bug 早在 2024 年 1 月便有人 提交了报告 ,但直到现在都尚未进行修复。
如果你的 BusyBox 编译失败,考虑切换到老内核继续进行,或是选择直接下载预编译版本。
下载编译Busy Box
我们首先在 busybox.net 下载自己想要的版本,笔者这里选用 1.36.0 版本:
1 | |
完成后进行解压:
1 | |
接下来我们配置编译选项,进入到源码根目录运行如下命令进入图形化配置界面:
1 | |
勾选 Settings —> Build static binary file (no shared lib) 以构建不依赖于 libc 的静态编译版本,因为我们的简易内核环境中只有 BusyBox,没有额外的 libc 等运行支持。
可选项:在 Linux System Utilities 中取消选中 Support mounting NFS file systems on Linux <2.6.23 (NEW);在 Networking Utilities 中取消选中 inetd。
接下来进行编译:
1 | |
编译完成后会生成一个 _install 目录,接下来我们将会用它来构建我们的文件系统
配置文件系统
首先在 _install 目录下创建最基本的文件系统结构:
1 | |
在我们创建的 ./etc/inittab 中写入如下内容:
1 | |
在上面的文件中指定了系统初始化脚本为 etc/init.d/rcS,因此接下来我们配置这个文件写入如下内容,主要是挂载各种文件系统,以及设置各目录的权限,并创建一个非特权用户
1 | |
然后为这个脚本添加可执行权限,该脚本通常用作我们自定义的环境初始化脚本:
1 | |
接下来我们配置用户组相关权限,在这里建立了两个用户组 root 和 ctf ,以及两个用户 root 和 ctf,并配置了一条文件系统挂载项:
1 | |
打包文件系统
本节我们讲述如何打包文件系统,这里提供三种不同的格式: qcow2 、 ext4 、 cpio。
QCOW2格式
QEMU Copy-on-Write verison 2 QCOW2 是QEMU的一种常见的硬盘格式,我们可以使用如下命令创建一个指定大小偶的 QCOW2 镜像文件:
1 | |
之后我们可以通过如下命令将其挂载为网络块设备:
在此之前你可能需要手动启动如下内核模块
sudo modprobe nbd max_part=8
1 | |
然后将其格式化为自己想要的文件系统,例如最常用的 ext4:
···shell
sudo mkfs.ext4 /dev/nbd0
1 | |
然后把前面我们构建的文件系统内容拷贝进去:
1 | |
记得要这样:
1 | |
复制文件时排除 rootfs.qcow2,不然太大了放不下
设置权限:
1 | |
最后常规卸载并解绑 nbd 即可:
1 | |
有点懒,剩下的之后有空折腾
启动内核
这里以前面编译好的 Linux 内核、文件系统镜像为例来介绍如何启动内核。我们可以直接使用下面的脚本来启动 Linux 内核:
1 | |
各参数说明如下,详细说明可以参照 QEMU 的官方文档:
-m:虚拟机内存大小。-kernel:内核镜像路径。-hda:文件系统路径,我们将 qcow2 镜像挂载为一个真正的硬盘设备,优点在于更贴近真实环境。-monitor:将监视器重定向到主机设备/dev/null,这里重定向至 null 主要是防止 CTF 中被人通过监视器直接拿 flag。-append:内核启动参数选项root=/dev/sda rw:该参数设定了根文件系统所在设备,因为我们使用-hda将其挂载为一个 SATA 硬盘,而 Linux 中第一个 SATA 硬盘的路径为/dev/sda,因此我们将根文件系统路径指向设备路径,并通过rw标识来给予可读写权限。kaslr:开启内核地址随机化,你也可以改为nokaslr进行关闭以方便我们进行调试。rdinit:指定初始启动进程,这里我们指定了/sbin/init作为初始进程,根据我们前面的配置其会默认以/etc/init.d/rcS作为启动脚本。loglevel=3&quiet:不输出 log。console=ttyS0:指定终端为/dev/ttyS0,这样一启动就能进入终端界面。
-cpu:设置 CPU 选项,在这里开启了 smep 保护。-smp:设置对称多处理器配置,这里设置了两个核心,每个核心一个线程。-nographic:不提供图形化界面,此时内核仅有串口输出,输出内容会被 QEMU 重定向至我们的终端。-snapshot:使用快照的方式启动,这样在虚拟机当中对文件系统的修改不会 “落盘”。-s:相当于-gdb tcp::1234的简写(也可以直接这么写),后续我们可以通过 gdb 连接本地端口进行调试。
启动后的效果如下:
如果你使用了 ext4 文件镜像,则应当修改部分启动参数如下:
1 | |
涉及改动的参数如下:
-hda:我们将文件系统路径从 qcow2 镜像改为 ext4 镜像。
如果你使用了 cpio 文件系统,则应当修改部分启动参数如下:
1 | |
涉及改动的参数如下:
-initrd:初始文件系统路径,cpio 文件系统会被载入到内存当中(initramfs)。-append:我们修改了root=/dev/ram,因为我们使用的是 initramfs ,所以文件系统位于内存中,因此我们需要将根文件系统路径变为内存设备。
此外,在没有设置 monitor 为 /dev/null 时,我们可以先按一次 CTRL + A、再按一次 C 来进入 QEMU monitor,可以看到 monitor 提供了很多有用的命令。1
2
3
4
5
6
7
8~ $ QEMU 9.1.2 monitor - type 'help' for more information
(qemu) help
announce_self [interfaces] [id] -- Trigger GARP/RARP announcements
balloon target -- request VM to change its memory allocation (in MB)
block_job_cancel [-f] device -- stop an active background block operation (use -f
if you want to abort the operation immediately
instead of keep running until data is in sync)
...
加载驱动
现在我们来加载之前编译的驱动。我们只需要将生成的 ko 文件拷贝到文件系统中,然后在启动脚本中添加 insmod 命令即可,具体如下:
1 | |
qemu 启动内核后,我们可以使用 dmesg 查看输出,可以看到确实加载了对应的 ko。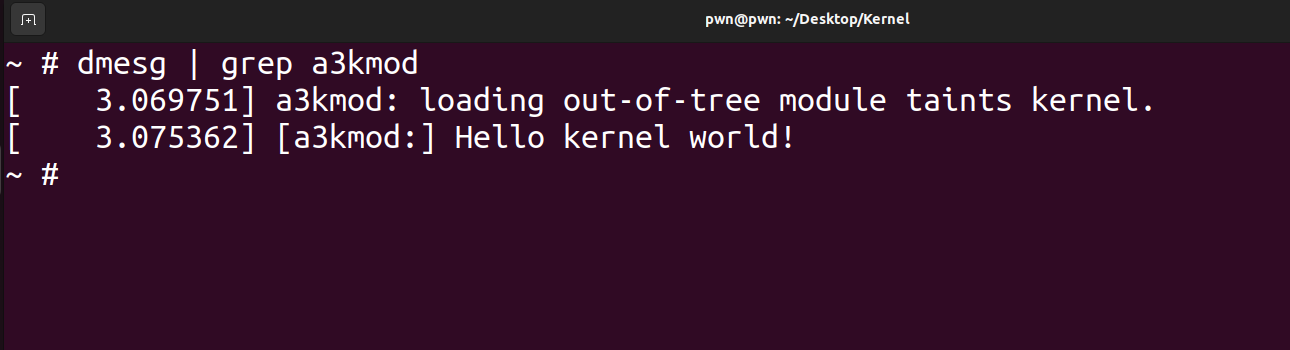
调试分析
为了方便调试,我们可以使用 root 用户启动 shell,即修改 init 脚本中对应的代码:
1 | |
此外,我们还可以在启动时,指定内核关闭随机化:
1 | |
基本操作
我们可以通过 /proc/kallsyms 获取特定内核符号的信息:
1 | |
通过 lsmod 命令可以查看装载的驱动基本信息:
1 | |
通过读取 /sys/module 目录,我们可以获取更为详细的内核模块信息:
1 | |
启动调试
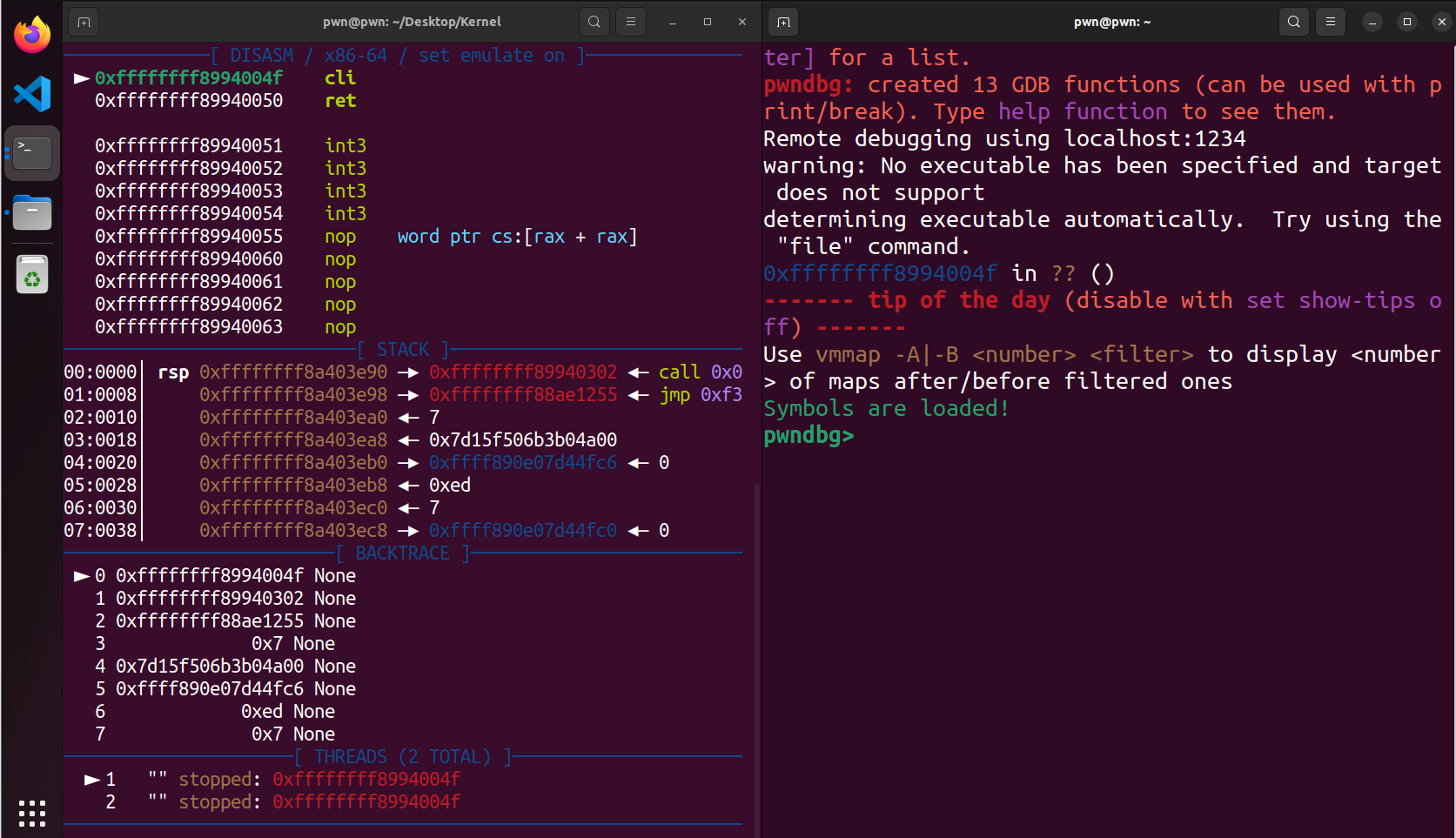
qemu 其实提供了调试内核的接口,我们可以在启动参数中添加 -gdb dev 来启动调试服务。最常见的操作为在一个端口监听一个 tcp 连接。 QEMU 同时提供了一个简写的方式 -s,表示 -gdb tcp::1234,即在 1234 端口开启一个 gdbserver。
当我们以调试模式启动内核后,我们就可以在另外一个终端内使用如下命令来连接到对应的 gdbserver,开始调试。
1 | |
使用 KGDB 进行调试
内核提供了专门的调试工具:KGDB(Kernel GNU Debugger),我们可以通过在编译时启用 CONFIG_KGDB=y 配置选项来将 KGDB 组件编译到内核当中,并使用串口等方式进行调试。
在 QEMU 模拟环境中,我们可以通过指定一个串口(例如 ttyS1 )为 KGDB 提供输出,例如考虑如下启动脚本:\
1 | |
- 我们为内核的启动参数添加了
console=ttyS0 kgdboc=ttyS1, ,为将串口ttyS0指定为控制台输出,将串口ttyS1指定为 KGDB 调试端口。 - 我们为 QEMU 启动参数添加了两个
-serial参数,意为创建了两个串口,其中第一个串口指定为标准输入输出,第二个串口指定为本地 4445 端口。
我们可以在 qemu 虚拟机内部通过执行echo g > /proc/sysrq-trigger命令触发 KGDB:
我们可以在 qemu 虚拟机内部通过执行 echo g > /proc/sysrq-trigger 命令触发 KGDB:\
在另一个终端使用 gdb 连接。
1 | |
References
- https://arttnba3.cn/2021/02/21/OS-0X01-LINUX-KERNEL-PART-II/
- https://arttnba3.cn/2022/07/15/VIRTUALIZATION-0X00-QEMU-PART-I/
- https://www.ibm.com/developerworks/cn/linux/l-busybox/index.html
- https://qemu.readthedocs.io/en/latest/system/qemu-manpage.html
- http://blog.nsfocus.net/gdb-kgdb-debug-application/
- https://zhuanlan.zhihu.com/p/631195884
- https://ctf-wiki.org/pwn/linux/kernel-mode/environment/qemu-emulate/