1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
| pwn@pwn:~/Desktop/unitree/unitree_ros2/cyclonedds_ws$ ls
src
pwn@pwn:~/Desktop/unitree/unitree_ros2/cyclonedds_ws$ colcon build
Starting >>> unitree_api
Starting >>> unitree_go
Starting >>> unitree_hg
--- stderr: unitree_hg
CMake Error at /opt/ros/humble/share/rosidl_adapter/cmake/rosidl_adapt_interfaces.cmake:59 (message):
execute_process(/usr/bin/python3 -m rosidl_adapter --package-name
unitree_hg --arguments-file
/home/pwn/Desktop/unitree/unitree_ros2/cyclonedds_ws/build/unitree_hg/rosidl_adapter__arguments__unitree_hg.json
--output-dir
/home/pwn/Desktop/unitree/unitree_ros2/cyclonedds_ws/build/unitree_hg/rosidl_adapter/unitree_hg
--output-file
/home/pwn/Desktop/unitree/unitree_ros2/cyclonedds_ws/build/unitree_hg/rosidl_adapter/unitree_hg.idls)
returned error code 1:
AttributeError processing template 'msg.idl.em'
Traceback (most recent call last):
File "/opt/ros/humble/local/lib/python3.10/dist-packages/rosidl_adapter/resource/__init__.py", line 51, in evaluate_template
em.BUFFERED_OPT: True,
AttributeError: module 'em' has no attribute 'BUFFERED_OPT'
During handling of the above exception, another exception occurred:
Traceback (most recent call last):
File "/usr/lib/python3.10/runpy.py", line 196, in _run_module_as_main
return _run_code(code, main_globals, None,
File "/usr/lib/python3.10/runpy.py", line 86, in _run_code
exec(code, run_globals)
File "/opt/ros/humble/local/lib/python3.10/dist-packages/rosidl_adapter/__main__.py", line 19, in <module>
sys.exit(main())
File "/opt/ros/humble/local/lib/python3.10/dist-packages/rosidl_adapter/main.py", line 53, in main
abs_idl_file = convert_to_idl(
File "/opt/ros/humble/local/lib/python3.10/dist-packages/rosidl_adapter/__init__.py", line 19, in convert_to_idl
return convert_msg_to_idl(
File "/opt/ros/humble/local/lib/python3.10/dist-packages/rosidl_adapter/msg/__init__.py", line 39, in convert_msg_to_idl
expand_template('msg.idl.em', data, output_file, encoding='iso-8859-1')
File "/opt/ros/humble/local/lib/python3.10/dist-packages/rosidl_adapter/resource/__init__.py", line 23, in expand_template
content = evaluate_template(template_name, data)
File "/opt/ros/humble/local/lib/python3.10/dist-packages/rosidl_adapter/resource/__init__.py", line 69, in evaluate_template
_interpreter.shutdown()
AttributeError: 'NoneType' object has no attribute 'shutdown'
Call Stack (most recent call first):
/opt/ros/humble/share/rosidl_cmake/cmake/rosidl_generate_interfaces.cmake:130 (rosidl_adapt_interfaces)
CMakeLists.txt:28 (rosidl_generate_interfaces)
---
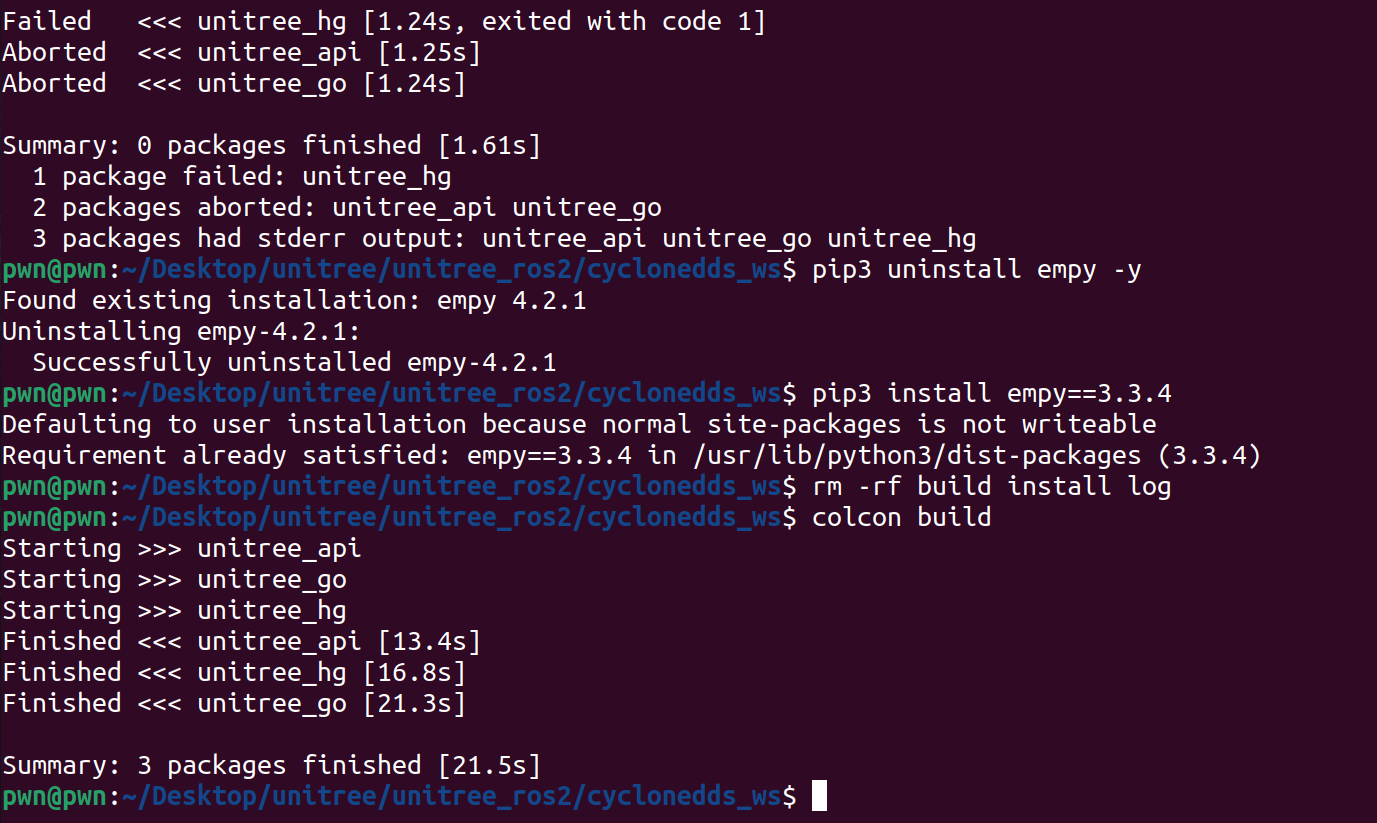
Failed <<< unitree_hg [1.24s, exited with code 1]
Aborted <<< unitree_api [1.25s]
Aborted <<< unitree_go [1.24s]
Summary: 0 packages finished [1.61s]
1 package failed: unitree_hg
2 packages aborted: unitree_api unitree_go
3 packages had stderr output: unitree_api unitree_go unitree_hg
|